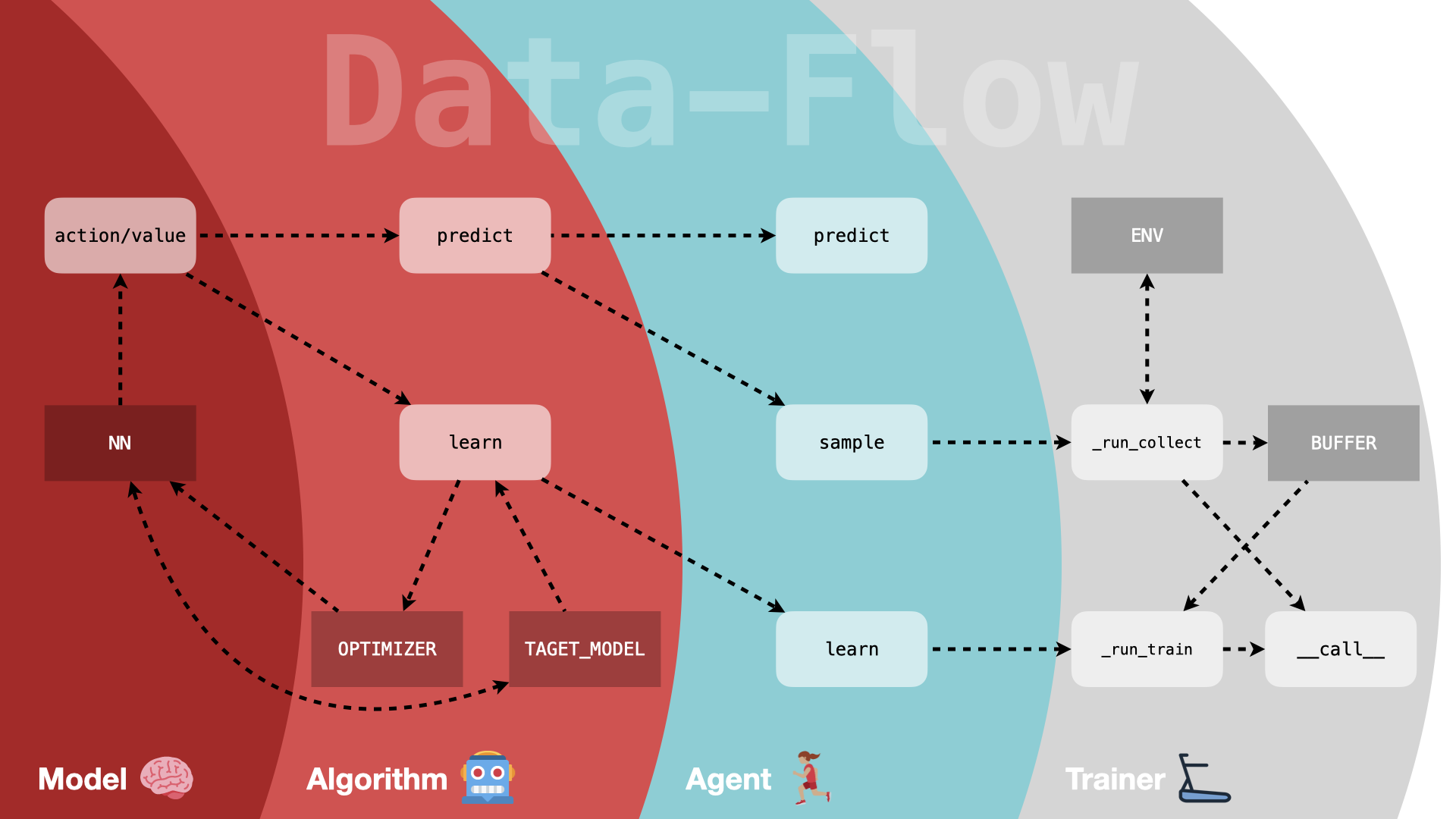
Each algorithm is mainly composed of four classes: Model📦, Algorithm👣, Agent🤖, Trainer🔁 with HAS-A relationship.
Model📦: Define single or multiple forward networks. The input is the observations and the output is the original output of networks.
Algorithm👣: Define the mechanism to update parameters in the Model📦 and the post-processing of the output of Model📦 (argmax, ...).
Agent🤖: A data bridge between Environment🗺 and Algorithm👣.
Trainer🔁: Define the overall training process of Agent🤖 and the tools to assist the training (Buffer,...).
The Trainer.__call__ function returns a generator that holds the training control-flow and all related data. The generator returns a log_data training log at each step, and the generator is called iteratively to complete the training and get all log_data.
The Logger📊 part uses Tensorboard and Weights & Biases to record training logs and decorates the Trainer.__call__ function, see the core code for the specific implementation.
classModel(nn.Module):def__init__(self,config:dict[str,Any])->None:passdefvalue(self,x:torch.Tensor,a:Optional[torch.Tensor]=None)->tuple[Any]:# Returns output value of a single or multiple criticspassdefaction(self,x:torch.Tensor)->tuple[Any]:# Returns action or action probability distributionpassclassAlgorithm:def__init__(self,config:dict[str,Any])->None:self.model=Model(config)# 1. Initialize model, target model# 2. Initialize optimizerpassdefpredict(self,obs:torch.Tensor)->tuple[Any]:# Returns action or action probability distribution or Q-functionpassdeflearn(self,data:BufferSamples)->dict[str,Any]:# Given the training data, it defines a loss function to update the parameters in the Model.# 1. Computing target# 2. Computing loss# 3. Update model# 4. Returns log_data of trainpassdefsync_target(self)->None:# Synchronize model and target modelpassclassAgent:def__init__(self,config:dict[str,Any])->None:self.alg=Algorithm(config)# 1. Initialize Algorithm# 2. Initialize run steps variablepassdefpredict(self,obs:np.ndarray)->np.ndarray:# 1. obs pre-processing (to_tensor & to_device)# 2. act = Algorithm.predict# 3. act post-processing (to_numpy & to_cpu)# 4. Returns the act used for the evaluationpassdefsample(self,obs:np.ndarray)->np.ndarray:# 1. obs pre-processing (to_tensor & to_device)# 2. act = Algorithm.predict# 3. act post-processing (to_numpy & to_cpu & add noise)# 4. Returns the act used for trainingpassdeflearn(self,data:BufferSamples)->dict[str,Any]:# Data pre-processing# Calling Algorithm.learn# Returns return of Algorithm.learnpassclassTrainer:@dataclasses.dataclassclassConfig:exp_name:Optional[str]=Noneseed:int=1# ...def__init__(self,config:Config=Config())->None:self.agent=Agent(config)# 1. Initialize args# 2. Initialize the training and evaluation environment# 3. Initialize Buffer# 4. Initialize Agentpassdef__call__(self)->Generator[dict[str,Any],None,None]:# 1. Define the training control-flow# 2. Returns a generatorpassdef_run_collect(self)->dict[str,Any]:# 1. Sample a step and add data to the Buffer# 2. Returns log_datapassdef_run_train(self)->dict[str,Any]:# 1. Samples data from the Buffer# 2. Training single step# 3. Returns log_datapassif__name__=="__main__":trainer=Trainer()forlog_dataintrainer():print(log_data)